
Control Elements
In this fast pyrolysis system, we have chosen an electrical heater to produce heat to the pyrolysis reactor which is the rotating cone. Besides, we have included a temperature controller into the system in order to maintain the desired temperature.
The transfer function of the temperature controller is shown below:
The transfer function of the temperature controller is shown below:

The order of the transfer function is first order.
Controlled variables: - Temperature of reactor (K)
- Pressure of reactor (Pa)
Manipulated variables: - Input from dryer (kg/hr)
Disturbance variables: - Feedstock (biomass) (kg/hr)
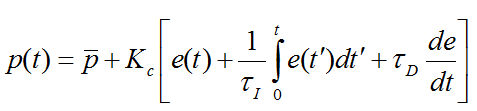
In our reactor design, we choose to use PID controller in our reaction. We choose PID over P and PI controllers because by using P controller alone, the offset that occurs after a set-point change or a sustained disturbance will not be eliminated and causes imperfection to the system. Besides, using PI controller will produce oscillatory response to the system and causes reset windup. When a sustained error occurs, the integral term in the integral controller will become large and the controller output will eventually saturates and leads to reset windup. Therefore, a derivative integral is much recommended to be added in the system as it anticipates the future error by considering its rate of change. With the presence of PID controllers, the oscillations created can be reduced and there will be no offset which benefits the system.
PID controller algorithm is:
Controlled variables: - Temperature of reactor (K)
- Pressure of reactor (Pa)
Manipulated variables: - Input from dryer (kg/hr)
Disturbance variables: - Feedstock (biomass) (kg/hr)
In our reactor design, we choose to use PID controller in our reaction. We choose PID over P and PI controllers because by using P controller alone, the offset that occurs after a set-point change or a sustained disturbance will not be eliminated and causes imperfection to the system. Besides, using PI controller will produce oscillatory response to the system and causes reset windup. When a sustained error occurs, the integral term in the integral controller will become large and the controller output will eventually saturates and leads to reset windup. Therefore, a derivative integral is much recommended to be added in the system as it anticipates the future error by considering its rate of change. With the presence of PID controllers, the oscillations created can be reduced and there will be no offset which benefits the system.
PID controller algorithm is:
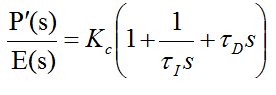
The transfer function for PID controller is:
| control_elements.pdf |
